
Looks way less professional than that in real life
Writes Code - Makes Robots




I have done some simple graphic design over the years.
Mostly for events and activities in college.





Hey there, I am Ahmed, Computer Engineering graduate from UIUC (May 2015).
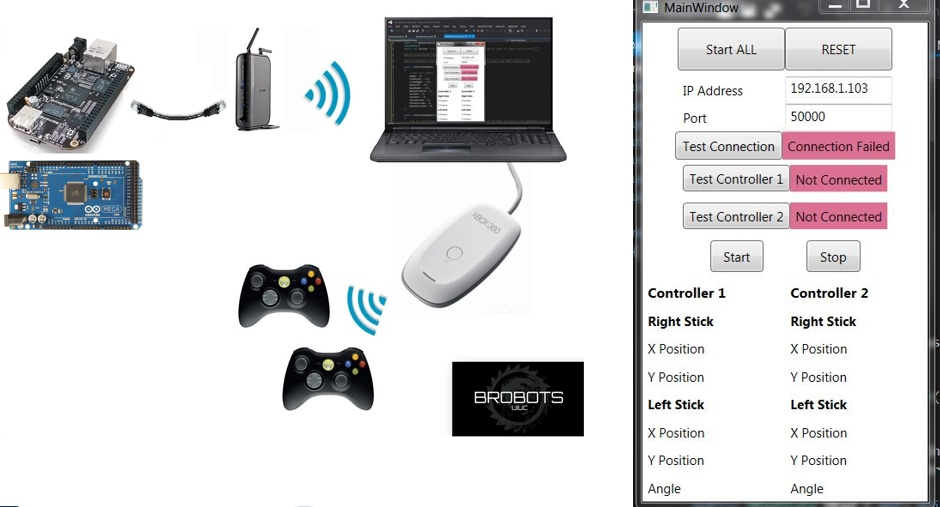
I am mostly interested in embedded systems and low level software. In college, I was the president of iRobotics, the largest robotics organization in UIUC. I spent the bulk of my time playing with microcontrollers and writing software for robots in our lab.
After graduation, I worked in Qualcomm (Boulder, Co) for 3 months as a software engineer. The company announced layoffs the week I started and 2 months later I got my layoff notice.
Currently, I am a financial software developer in Bloomberg LP (Manhattan, New York Office).
Feel free to contact me with regards to any new opportunities. I have 4 years of volunteer experience with FIRST and I am currently looking for a FLL/FRC team to mentor in the New York City Area in my free time.
All/any views represented here are my own.


{kind=link}